二维码

工博士官方客服微信
联系方式
联系方式
电话:18616728999
服务时间 8:30~18:00
返回首页
回到顶部
ABB机器人如何设置沿路径倒退运行?
2018-02-08 21:35:08
1)机器人运行过程中,可能某些原因,需要机器人沿原路径倒退回某位置后才能执行后续动作。
2)要使用这个功能,需要有611-1PathRecovery选项
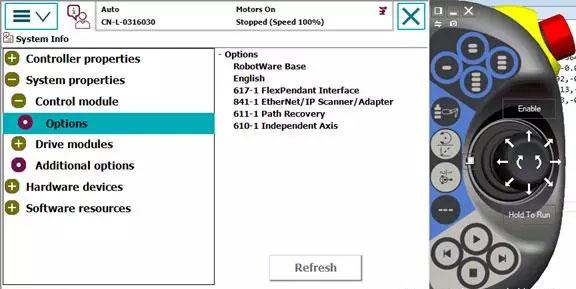
图1▲
3)指令PathRecStart用来记录回退的起点,pathRecStop停止记录回退
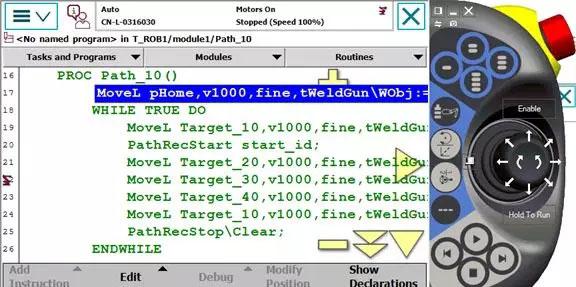
图2▲
4) PathRecMoveBwd\ID:=start_id;表示机器人沿原路径倒退,退到ID起点处
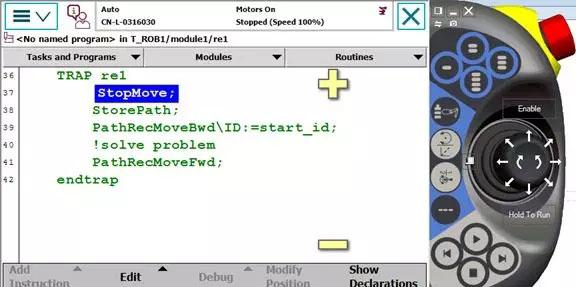
图3▲
5)如果问题处理完,需要回到刚才发生问题处,可以使用PathRecMoveFwd
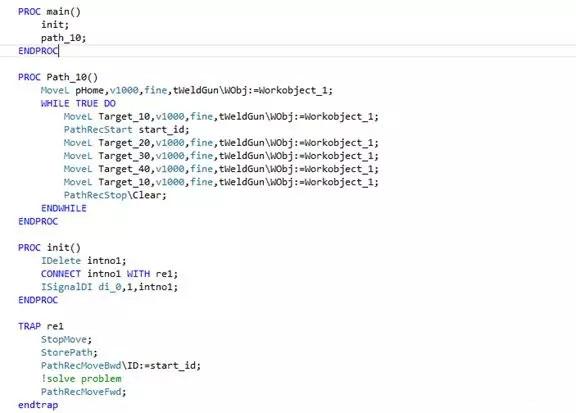
6)以下程序示例为机器人运行,通过中断触发(模拟发生故障等),机器人回退到起点,处理完故障后运行回故障发生位置,继续运行